- 代码地址:https://github.com/Jiahonzheng/Robotics/tree/master/HW1
- 演示视频:https://www.bilibili.com/video/av67860978
任务概要
-
参考文档中 Tutorial – BubbleRob Tutorial 部分,学习:
- 车身与轮子物理引擎的设计
- 动力学模型等参数的设置
- 传感器的添加与使用
- 驱动关节的设计与控制
- 控制脚本的编写
-
搭建四轮小车
- 搭建四轮小车,小车搭载一个单目彩色摄像头
- 尺寸、底盘参数可参考 DJI RoboMaster S1 进行设计
- 不采用麦克纳姆轮
- 编写简单脚本使得小车能呈 S 型路线行走,当碰到障碍物后能够绕行
完成情况
- 已初步熟悉 V-REP 软件的基本使用,如车身与轮子的物理引擎的设计、动力学模型的参数设置、传感器的添加与使用、驱动关节的设计与控制、控制脚本的编写等功能。
- 已成功搭建装载一个单目彩色摄像头的四轮小车,使用 Ackermann 运动学模型,前轮可转向,且未使用麦克纳姆轮,能呈 S 型路线行走,碰到障碍物能够绕行。
总体设计
机器人由长方体车身和四个轮子、传感器、彩色摄像头组成,两个前轮主要负责转向和动力输出,两个后轮作为从动轮,传感器负责检测前方障碍物并绕行。
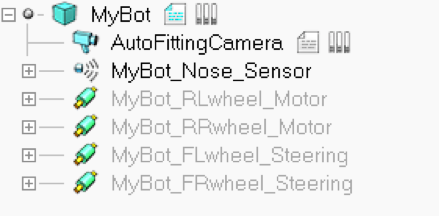
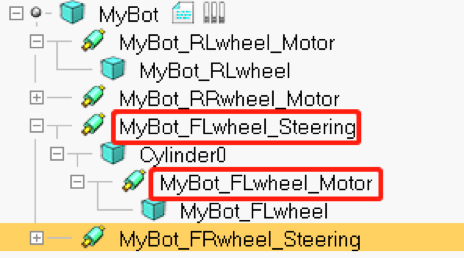
以下是 MyBot 机器人的总体设计层次图,其中 FLwheel_Steering 和 FRwheel_Steering 为前轮;RLwheel_Motor 和 RRwheel_Motor 为后轮;Nose_Sensor 为传感器,搭载单目彩色摄像头;AutoFittingCamera 为自适应摄像头,用于拍摄机器人运动时的姿态。
车身构建
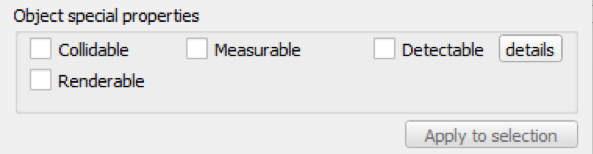
我们使用 Cuboid 作为车身主体,为避免主体与其他部件冲突,我们需要设置其 Object 属性,关闭 Collidable 等属性。
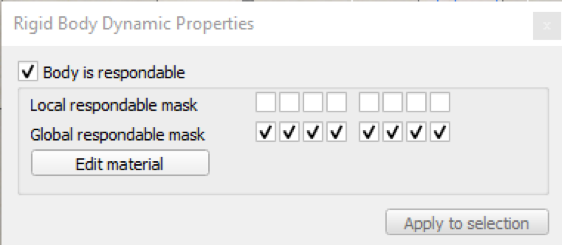
同时,我们需要关闭 Local Respondable Mask 属性。
车轮构建
我们将机器人的车轮划分为两组:前轮组(Front)和后轮组(Rear)。前轮组负责转向和动力,后轮组则为从动轮。
由于我们希望前轮组既负责转向功能,又负责动力输出。为实现这两个功能,我们需要两个转动关节,其中一转动关节竖向放置,用于控制转向角度,另一转动关节横向放置,用于输出动力。
以下是 MyBot 的各车轮的层次图。注意到,以前左轮(FLwheel)为例,其由竖向关节(Steering)和横向关机(Motor)构成;与之不同的是,后左轮(RLwheel)则由横向关节(Motor)构成。
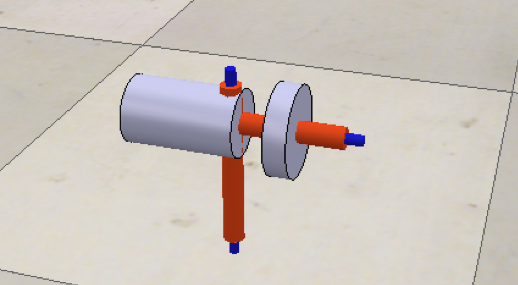
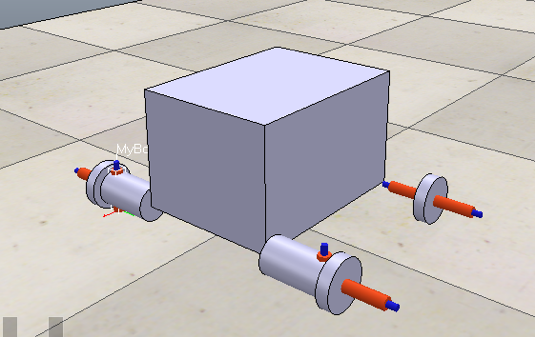
以下是机器人的车轮拆解示意图(已设置各部件的可视状况):拥有两个转动关节的即为前轮组,仅拥有一个转动关节的为后轮组。
直线运动
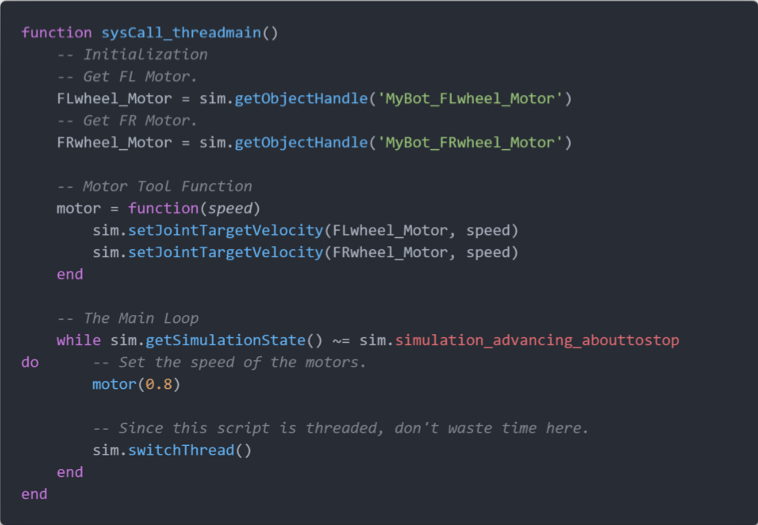
为实现直线运动,我们需要编写脚本。而在这里,我们使用 Threaded Child Script 进行脚本的填写,其涉及到一个很重要的函数,名为 sysCall_threadmain ,这是一个需要用户填充自定义代码的函数模板,模板如下。
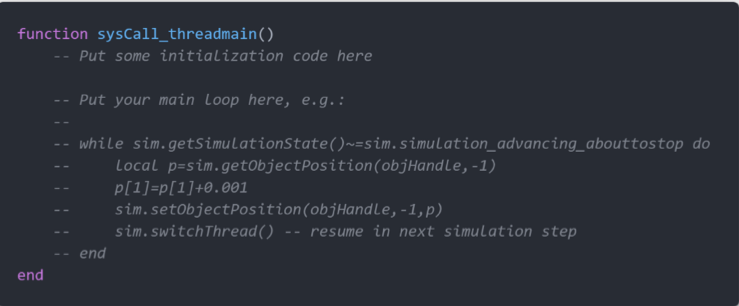
在 sysCall_threadmain 函数模板中,我们需要将变量的初始化放置在主循环之外,机器人的运动逻辑放置在主循环之中,这是需要注意的地方。
现在,我们进行直线运动的脚本编写。我们知道,在前面的车轮构建部分中,我们添加了两个前进电机。所以,我们可通过 setJointTargetVelocity 设置这两个前进电机同样的运行速度,实现机器人的直线运动。
为此,我们实现了 motor 工具函数,该函数用于两个前进电机的动力设置,其相关代码如下。
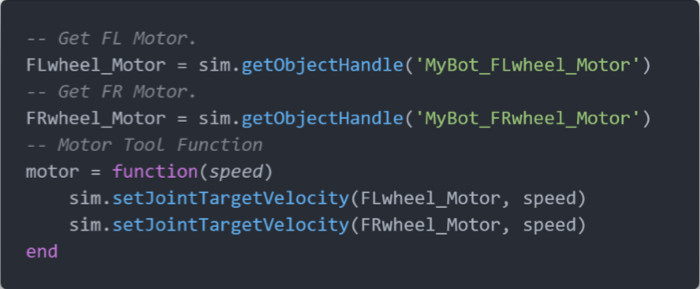
在上述脚本中,我们通过 getObjectHandle 获取两个前进电机的实例。在 motor 工具函数中,我们使用 setJointTargetVelocity 设置两个电机同样的运行速度。由于我们所添加的脚本是 Threaded 类型,我们需要在 while 主循环内,执行了 motor(0.8) 命令。按下模拟按钮后,我们即可观察到机器人进行直线运动。
下面是直线运动的全部脚本代码,后续由于篇幅限制,只贴出关键部分的代码。
S 型运动
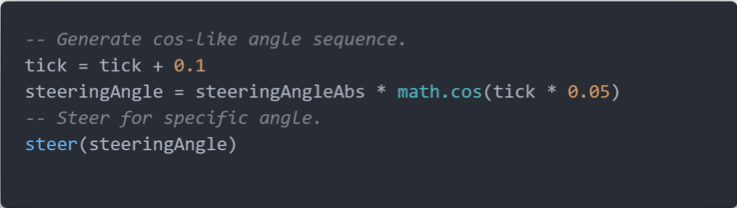
在实现机器人的直线运动后,我们需要在其基础上,使得机器人能够以 S 型路线前进。我们的思想很简单:在电机启动的情况下,控制转向角度,使其按照余弦函数变化,即可控制机器人的前进路线为 S 型路线。
我们使用的是 Ackermann 转向运动学模型。根据该运动学模型,车辆在转弯时,其两个转向轮的转向角度是不一致的,但其角度可由数理公式推导而出。为此,我们实现了 steer 转向工具函数,实现两个转向轮能够按照模型进行不同角度的转向。

在 steer 工具函数中,我们为其传入 d 和 l 参数,它们分别与左右轮间距和前后轮间距有关,是转向运动学模型所必需的参数。我们通过 getObjectHandle 获取两个转向关节的实例,通过 setJointTargetPosition 控制两个转向关节的角度,进而控制机器人的前进方向。
传感器
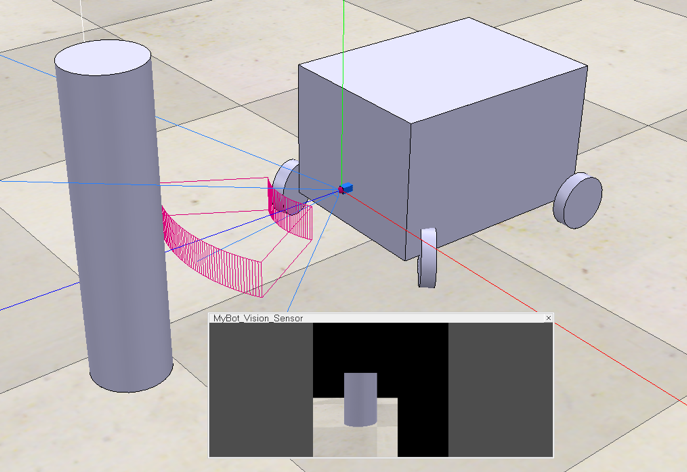
我们在 Body 添加 Proximity Sensor ,用于搭载单目彩色摄像头,用于避障算法的障碍物检测。
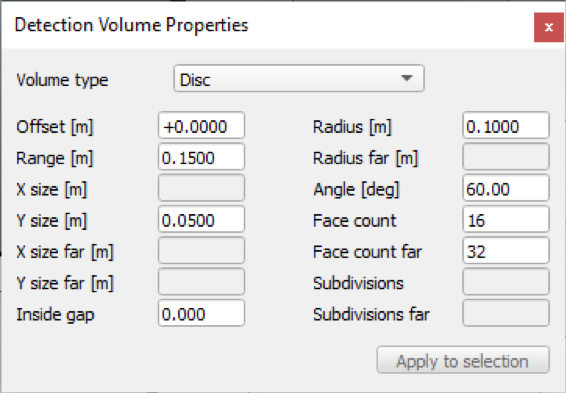
下面是 Nose Sensor 的 Volume 的各项属性,我们将 Volume Type 设置为 Disc ,并配置其的角度和半径等参数。
在设置好 Nose Sensor 的属性后,我们为其添加单目彩色摄像头,并设置好摄像头属性,最后添加 Floating View 用于显示摄像头的视野。
简单避障
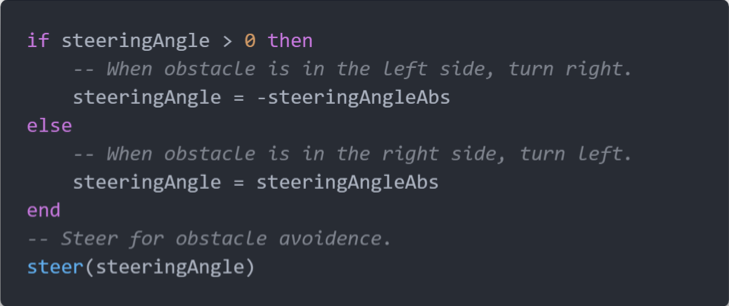
我们使用这样的避障算法:当机器人在往左边运动的过程中,探测到了障碍物,则将转向角度设置为往右边运动的最大角度,该操作持续一段时间,直至无探测到障碍物或达到阈值时间,随后设置转向角度为往左边运动的最大角度,继续原有的运动。
我们使用 Nose_Sensor 作为障碍物的探测感应器,通过获取其探测结果,来决定是否采取避障措施。
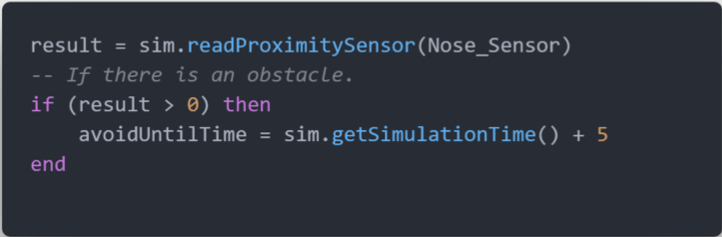
若探测到障碍物,设置避障操作的阈值时间,同时我们根据当前的运动方向,设置避障所需要的最大转动角度和方向。
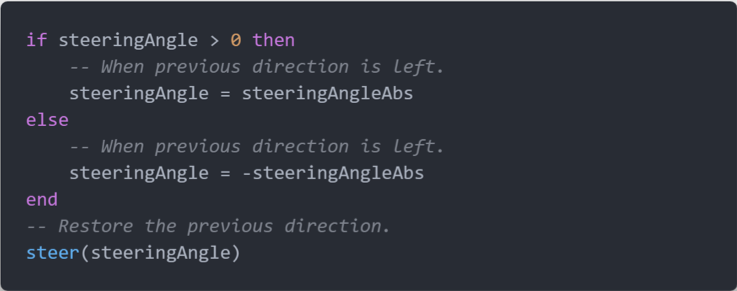
在超出阈值时间后,即机器人已远离障碍物后,我们重新设置机器人的转动方向为原有的运动方向,且转动角度设置为最大转动角度。
若机器人在前进过程中,未探测到障碍物,则其转动角度一直按余弦函数变化。
效果演示
以下是机器人转向的静态示意图,已隐藏转动关节等部件。
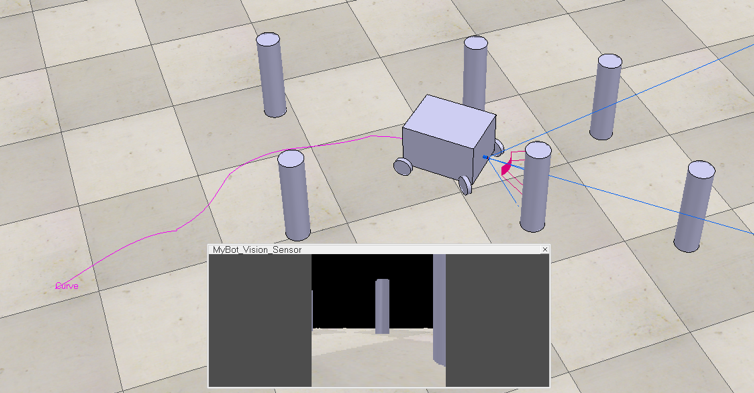
下面是机器人避障的示意图,详细细节可参考视频:https://www.bilibili.com/video/av67860978
存在问题
本次搭建的四轮小车存在以下未解决的问题:避障算法过于简单,由于只装载了一个 Nose Sensor 且传感器类型为 Vision ,我们无法获取障碍的方位信息,这使得我们的算法的避障方式不具备鲁棒性。
在搭建机器人的过程中,我们还遇到了其他的问题,但最终都解决了。在构建前轮转向关节时,我们一开始使用的是 Cuboid 连接竖向关节(用于转向)和横向关节(用于前进),后来在模拟时出现了剧烈的抖动现象。一开始,我们发现 Cuboid 物理引擎属性被设置了 Respondable 和 Collidable 等属性,怀疑是属性设置的原因,调整属性后,发现问题仍存在。最终,我们在比对 V-REP 提供的 Ackermann 模型时,发现问题可能出现在竖向关节和横向关节的连接上。于是,我们通过将 Cuboid 更换为 Cylinder ,模拟过程出现的剧烈抖动问题就被成功解决。但当转弯角度过大时,前轮会与车体碰撞,使得前轮转弯角度无法到达预期角度,我们通过设置车体的 Local Respondable Mask 全为空,以及关闭 Collidable 等属性,修复了车体阻碍前轮转向的问题。
模拟期间,我们发现小车在未启用任何脚本的情况,出现了异常的移动情况。由于在 Tutorial 中出现了类似情况的解决办法,我们尝试用其提及的增大 Body 和 Wheel 的质量来解决此问题。经过了多次对不同部件的质量调整,我们将小车的异常移动稳定到一个可以接受的范围,但也算成功解决了此问题。