- 代码地址:https://github.com/Jiahonzheng/Robotics/tree/master/HW2
- 演示视频:https://www.bilibili.com/video/av67860978
任务概要
- 参考文档中 Tutorial – Line Following BubbleRob 部分,学习:
- 巡线小车任务描述
- 自定义线路径的添加与编辑
- 光感巡线小车的简单逻辑与巡线效果
- 参考文章 Vision Sensors 章节,学习:
- 视觉传感器的概念
- 视觉传感器的参数设置
- 视觉传感器相关 API
- 学习 PID 算法原理
- 学习数字图像处理相关知识
- 在任务1的基础上,调整单目摄像头的角度,使之能够看到地面上的路线
- 结合小车底盘模型设计合理的 PID 算法,编写脚本实现基于单目图像的巡线功能
- 调节量是什么?轮速?舵机转角?是调节增量还是位置?
- 偏差量是什么?左半边跟右半边黑色像素的数量?线中心的位置?斜率?
完成情况
- 已熟悉巡线小车的任务描述,并熟悉 V-REP 软件的基本使用,如车身与轮子的物理引擎的设计、动力学模型的参数设置、传感器的添加与使用、驱动关节的设计与控制、控制脚本的编写、自定义线路径的添加与编辑等功能,已了解视觉传感器的概念、参数设置和相关 API 。
- 已学习 PID 算法原理,大致理解 P、PI、PID 控制等方案的异同。
- 已在任务 1 的基础上,调整单目摄像头的角度,使其能看到地面上的路线,并实现了基于 PID 控制理论的巡线功能。
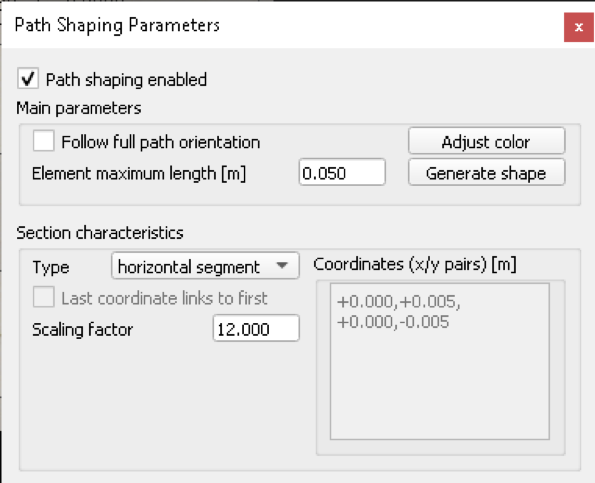
自定义路线
巡线小车必不可少的就是路径,在 Tutorial – Line Following BubbleRob 有比较详细的介绍。我们在 [Menu bar–>Add–>Path–>Circle type] 添加 path ,打开 Object Movement with the Mouse 开关,这样我们就可以用鼠标控制 path ,然后在左边工具栏打开 Path Edit Mode ,这样我们就可以比较方便调整路径的形状。
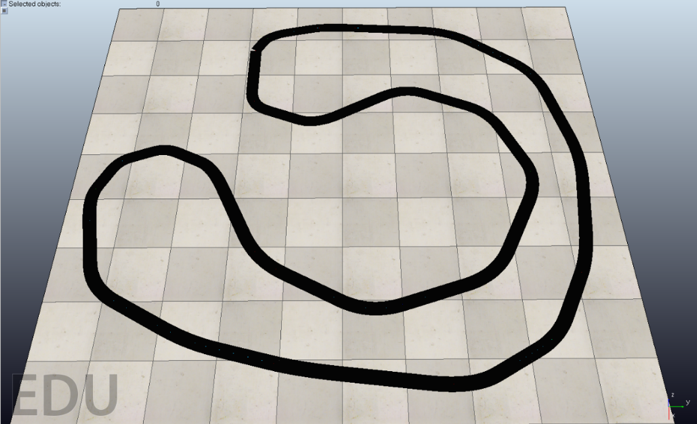
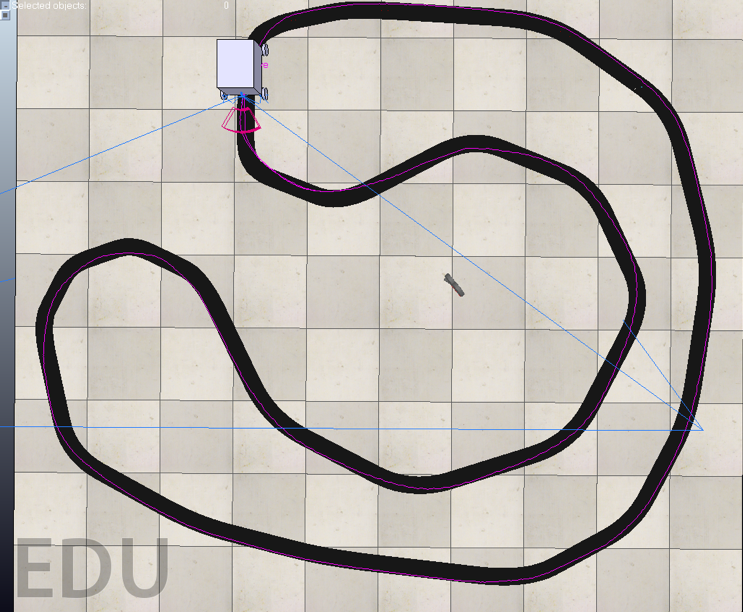
最终,我们设计并添加了如下图所示的路径。
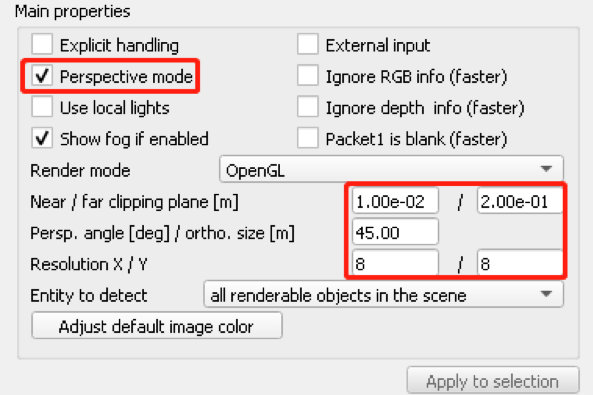
传感器
传感器是巡线小车的核心组件,为实现巡线,我们为其添加了 3 个 Vision Sensor ,分别是 MyBot_Left_Sensor、MyBot_Middle_Sensor、MyBot_Right_Sensor。这三个传感器可以在 [Menu bar –> Add –> Vision sensor –> Orthographic type] 添加,并设置角度为 [180;0;0] ,并这三个传感器拖进我们的小车中。值得注意的是,我们需要将这三个传感器设置为 Perspective mode ,并设置分辨率和角度。我们将分辨率设置为 8*8 ,将拍摄角度设置为 45 度。
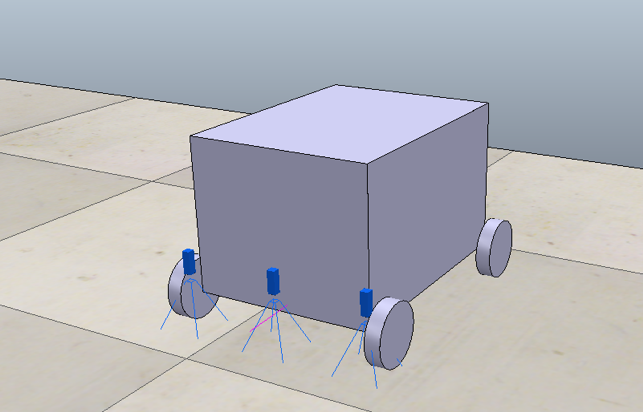
以下是我们在任务 1 的机器人基础上,添加完 3 个视觉传感器的静态效果图。
工具函数
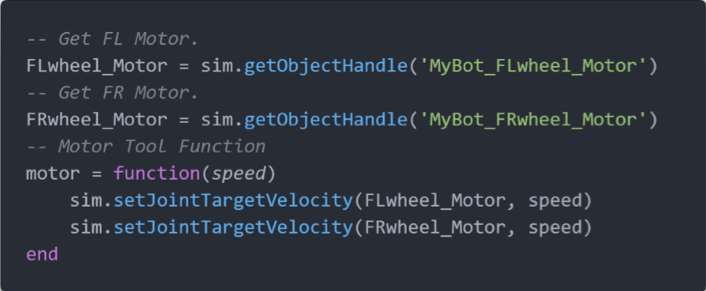
我们实现了 motor 工具函数,该函数用于两个前进电机的动力设置,其相关代码如下。
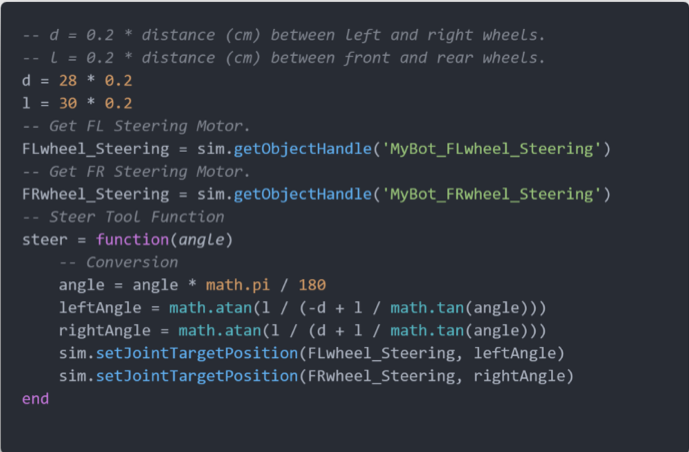
我们使用的是 Ackermann 转向运动学模型。根据该运动学模型,车辆在转弯时,其两个转向轮的转向角度是不一致的,但其角度可由数理公式推导而出。为此,我们实现了 steer 转向工具函数,实现两个转向轮能够按照模型进行不同角度的转向。
基于非 PID 的巡线功能实现
我们先实现非 PID 控制的巡线功能,我们的思路很简单:通过在主循环里,我们通过 readVisionSensor 读取视觉传感器的数据,根据左右传感器的数据情况,进行转向;若只有左边的传感器检测到线,则向左转向;若只有右边的传感器检测到线,则向右转向;若左右传感器都检测到线,则直行。
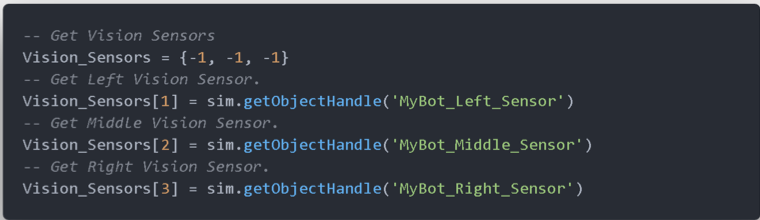
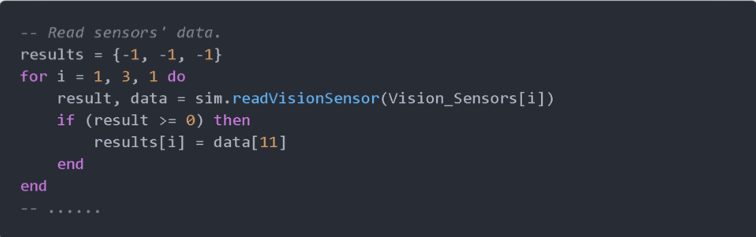
在读取视觉传感器数据之前,我们需要获取传感器实例,具体代码如下。注意到,我们用数组维护传感器实例,这是为了后面,我们能够方便地读取数据。
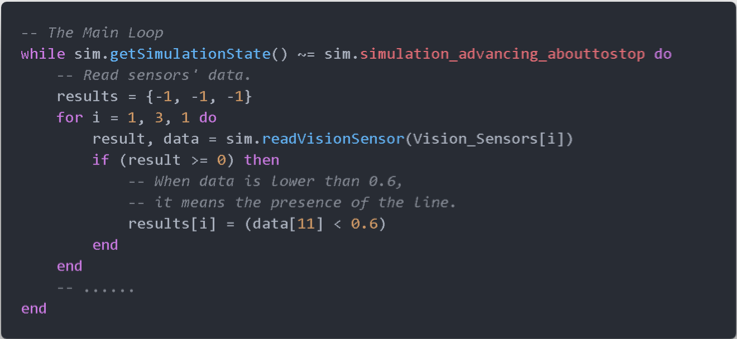
我们在 Threaded 脚本的主循环中,通过调用 sim.readVisionSensor 获取各传感器的数据,并跟阈值(0.6)进行比较,若小于阈值,则表明已探测到线,否则表明未探测到线。
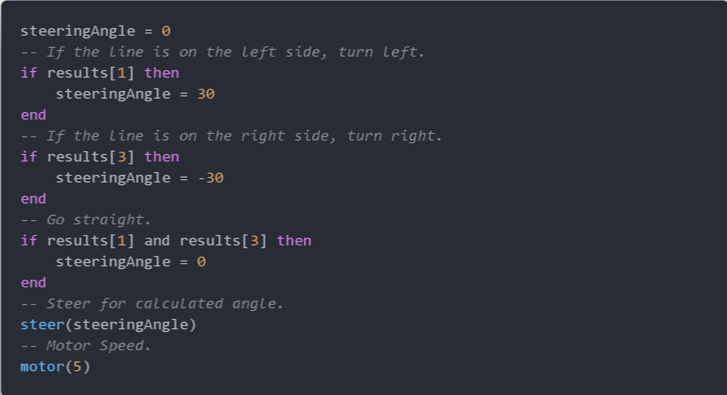
在获取到数据后,我们即可用其来控制机器人转向的角度:当只有左传感器探测到线时,设置转向角度为左转 30 度;当只有右传感器探测到线时,设置转向角度为右转 30 度;其余情况,设置转向角度为 0 度,即进行直行运动。
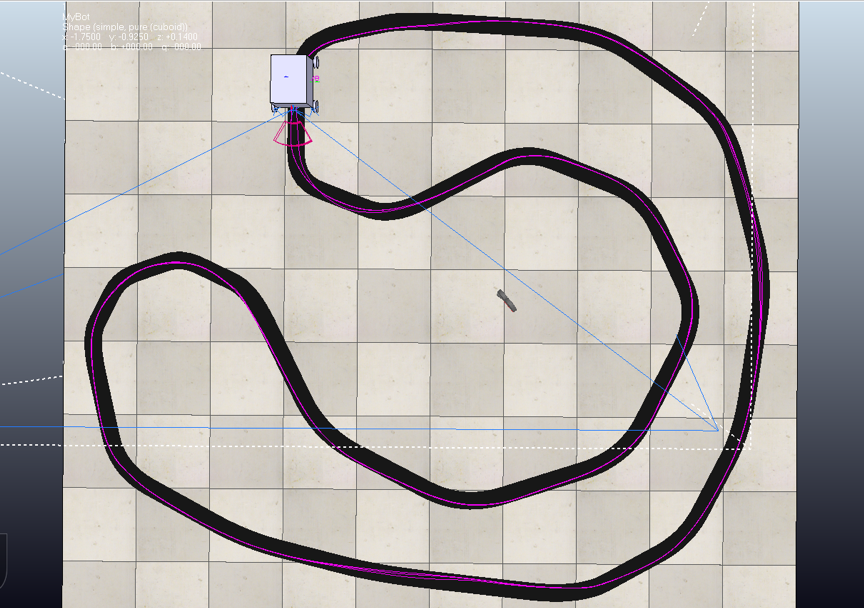
点击仿真按钮运行后,我们可以看到小车成功地完成了巡线任务,其运行轨迹鸟瞰图如下。
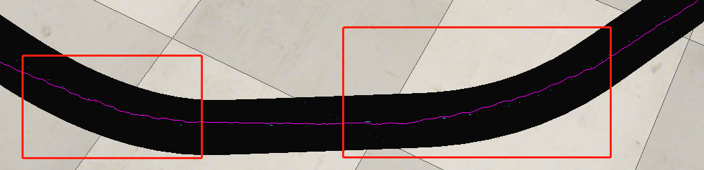
尽管,我们成功实现了在不使用 PID 控制的条件下,机器人完成巡线任务的任务,但仍是存在问题。我们仔细查看运行轨迹,即可发现存在不少的抖动,这是需要改进的地方。下图是一个典型的轨迹抖动的示例。
P、PI、PID
在实现基于 PID 的巡线功能之前,我们先分析 P、PI、PID 三者的差异。我们先分析一下 PID 三项的关系:
- 比例控制 P 是主要的控制方法,承担了 PID 控制中的大部分任务。
- 为了消除比例控制 P 留下的静态偏差,增加了积分控制 I 。
- 微分控制 D 只为稳定而存在,其稳定效果应该大于积分控制I的失稳效果,在有大量噪音的系统中,不使用微分控制 D 。
P 控制器,是最基本的控制形式,如果输出的结果偏移量或偏差为常量且可接受,则可使用此方法,缺点是存在静态偏差。
PI 控制器,积分控制I能消除比例控制P留下的静态偏差,能够满足不少控制要求,若不存在稳定性问题,则可使用此方法,其优点是良好的阻尼、静态偏移为零,缺点是反应缓慢。
PID 控制器,是一个完整的三项 PID 控制,在使用积分模式造成不稳定时使用,能够减少上升空间、消除静态误差、减少超调。
基于 PID 的巡线功能实现
我们将左右传感器的像素差异作为偏差量,将转向的角度作为调节量,来实现基于 PID 的巡线功能。
我们需要对前面的传感器数据的处理方式进行修改,具体变动如下。
由于我们直接使用左右传感器的像素差异作为偏差量,所以我们需要将 results 设置为传感器原始数据。
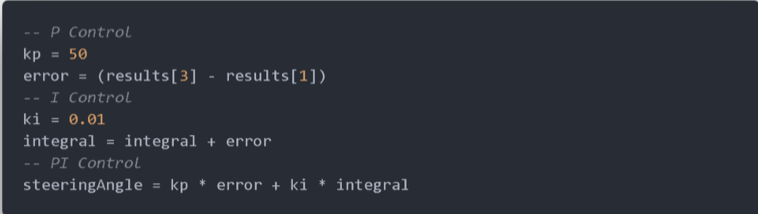
首先,我们实现 P 控制器,需要完成比例控制单元。比例单元,就是我们将偏差量乘以比例系数 kp ,得到调节量。经过多次参数的调整,我们将 kp 设定为 50 ,在该设定下,机器人运动轨迹比非 PID 控制的轨迹平稳许多。

随后,我们实现 PI 控制器,需要完成积分控制单元的设计。在积分单元中,我们对偏差量进行累加,得到积分量,将其乘以比例系数 ki ,最后与 P 控制器一同作用于调节量。
在实现完 PI 控制器后,我们需要完成微分单元的设计。我们现在有了比例控制单元,用于纠正当前的误差,有了积分控制单元,用于纠正过去的误差,还需要微分单元,用来及时预测未来,对还未发生的误差进行纠正。
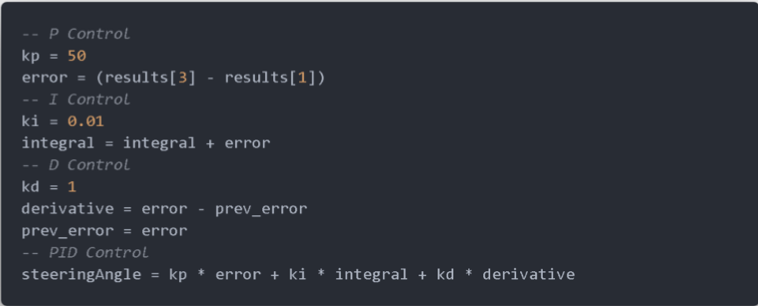
如上图所示,我们得到了 PID 控制器的表达式,虽然形式简单,但其各个部分的比例系数的确定是比较麻烦的,需要反复调整与测试,最终经过我们多次调整,发现 kp=50 、ki=0.01、kd=1 是一组合适的参数。
效果展示
下面是机器人巡线的示意图,详细细节可参考视频:https://www.bilibili.com/video/av68748101
我们可以看到,基于 PID 控制的巡线功能,相比于非 PID 的巡线,其轨迹更为平滑。
存在问题
本次实验,进行得较为顺利,途中虽遇到了很多问题,但最终还是成功解决了。在读取视觉传感器数据时,由于一开始我们并没有对其结果是否存在进行判定,导致运行时出现了 attempt to index global 'data' (a nil value) 的错误,在仔细研究 Tutorial 代码后,我们发现了此问题的根源,并将其解决。
PID 控制部分并未在 Tutorial 中提及,所以一开始时,我们并不知道如何实现,不知道如何下手。反复查看 PPT 和相关资料后,我们搞清楚了“谁是偏差量”和“谁是调节量”这两个核心的问题,后面的 PID 控制代码的编写是水到渠成的。在实验过程中,我们的参数调整,也算是有些坎坷,调整了很多次,但最终也找到了合适的参数组合。